第1回大会用 レスキューダミー「ダミヤン」
ご注意: ★印はまだ提供の準備ができていない情報です.
旧ページへ
以下のページではPDFファイルを多用していますので,それらを読むために,Adobe社のAcrobatReaderかAcrobatとWWWブラウザ用のプラグインをインストールすることをお薦めします.AcrobatReaderはAdobe社のWWWページから無料で入手できます.
はじめに
このページでは,2001年7月23,24日に開催されるレスキューロボットコンテスト第1回大会のために開発中のレスキューダミー「ダミヤン」の情報を提供します.
 私がダミヤンです.よろしく!
私がダミヤンです.よろしく!
レスキューダミーとは?
このコンテストでは,主に遠隔操縦型の移動ロボットを使って,災害現場を約1/8スケールで模擬したフィールドの中から要救助者を模擬したレスキューダミー(人形)を救出し安全な場所へ運搬することを競います.そこでは迅速さとともに,対象であるダミーを優しく扱うことが求められています(ダミーを手荒に扱うと減点されます).したがって,ダミーは「痛み」を検知して数値化し,その情報をフィールド外に実時間で伝送できる必要があります.
実行委員会では,このコンテスト用に限らず,レスキュー活動の評価に用いるセンサを内蔵した人形を「レスキューダミー(RESCUE-DUMMY)」と呼ぶことにしました.これは,自動車の衝突実験に使われるダミーと同じ位置付けのものです.
さらに,第1回大会用のレスキューダミーに「ダミヤン(DAMIYAN)」という愛称を付けました.「ダミヤン」ではなく,「ダミヤン」です.アクセントは「ダ」ではなく「ミ」にあります.そうです,これは大阪弁なんです.
レスキューダミーの考え方
私たちは,レスキューダミーの情報をできる限り公開する方針です.それによって,参加チームが同じようなダミーが作れることを考慮しています.また,さらには,参加チームとともにより良い(本物らしい,高性能な,小型な,安価な)ダミーを育てていきたいと考えています.ダミーに対する皆さんからのコメントや提案を歓迎します.もしかすると,情報の公開によって,ダミーの弱点を見つけることができるかもしれません (例えば,人間に対しては望ましくないが,センサが感知しないダミーの把持方法など).弱点を見つけてそれを指摘してくださることを歓迎しますが,それを利用して高得点を狙うことはやめてくださるようお願いします.その理由は,レスキューロボットコンテストのフィロソフィーを再読していただければ,おわかりになると思います.
ダミーに関する質問・コメント・提案は,office@rescue-robot-contest.orgまでご連絡下さい.
レスキューダミーの仕様の概要
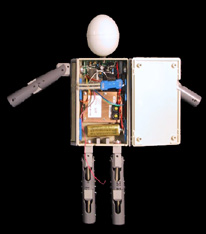
- 身長290mm, 体重450gf.
- 体表センサ,引っ張りセンサ,加速度センサを内蔵.
- 体表センサは,胴体の表面に貼り付けられており,胴体表面にかかる押し付け力を検知.
2kgfまでの荷重を測定可能.1チャンネル.
- 引っ張りセンサは,腕と脚の根元に取りつけられており,腕や脚にかかる引っ張り力を検知.
1kgfまでの荷重を測定可能.4チャンネル.
- 加速度センサは,胴体の内部に取りつけられており,ダミーにかかる衝撃や振動を検知.
100m/s2 (10G)までの加速度を測定可能.3チャンネル.
- 8チャンネルのセンサ信号を1/1000秒程度の間隔でAD変換.
それらの値を積算したデータセットを1秒間に5回程度の頻度でフィールド外のPCにへ送信.
現在,昨年の11月から始めた試作機による検討をほぼ終えて,コンテストで使う本番機の製作に取り掛かっています.したがいまして,このページでは,当面,試作機の情報と製作中の本番機の情報を取り混ぜて提供します.4月中には,全て本番機の情報に置き換える予定です.
データの更新が遅れています.今しばらくお待ちください.
本番機の寸法および重量は現在公開しているデータの通りです (5月8日).
実装
(C) 2001 Rescue Robot Contest Committee
