ボディ
概要
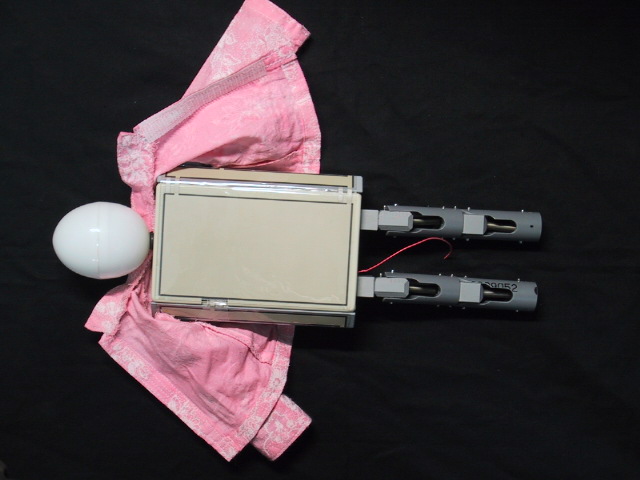
ボディは,胴体,頭,腕,脚,服より構成されています.
服以外の部分の設計・製作は,木村技研が担当しました.
胴体
中心は,テイシン電機のモールドケースTB-54 (120×70×35mm,ABS樹脂製)です.その両側の長側面にポリ塩化ビニル(塩ビ)製の台形柱を接着して,断面が八角柱になるようにしています.八角柱の各面には,体表センサを貼っています.色々な向きから把持されても体表センサが検知するように,形状を八角柱にしてみました.
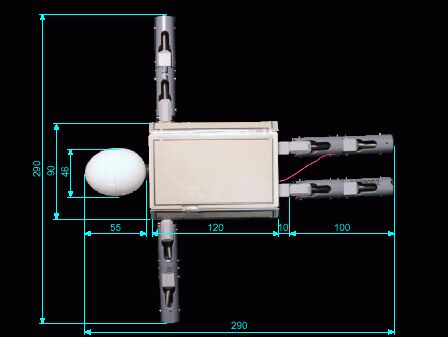
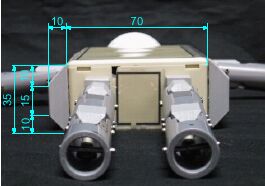 胴体の寸法
胴体の寸法
頭
短軸の長さが46mm, 長軸の長さが55mmの軸対称な楕円体です.厚さ5mmのゴム製のブッシュを介して胴体にネジ止めされています.
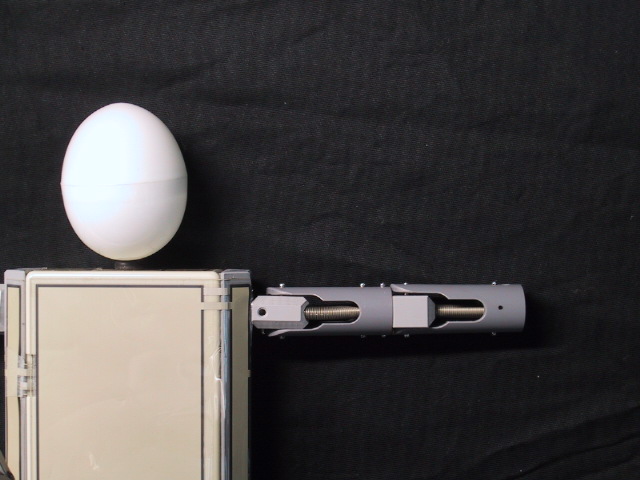
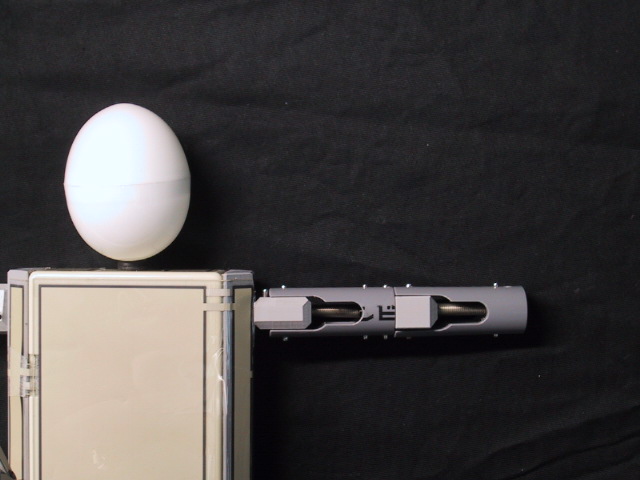
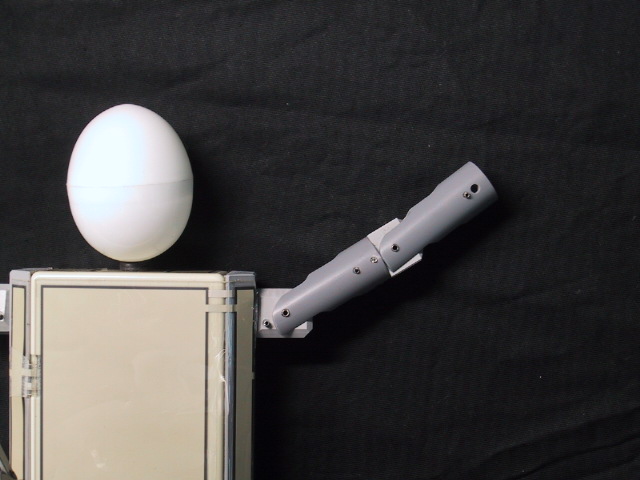
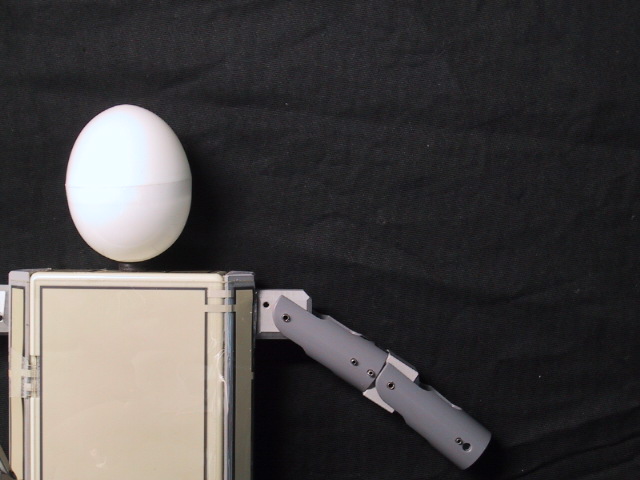
腕
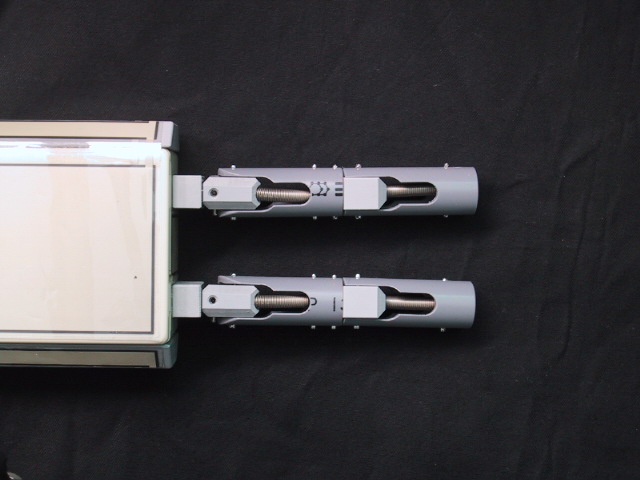
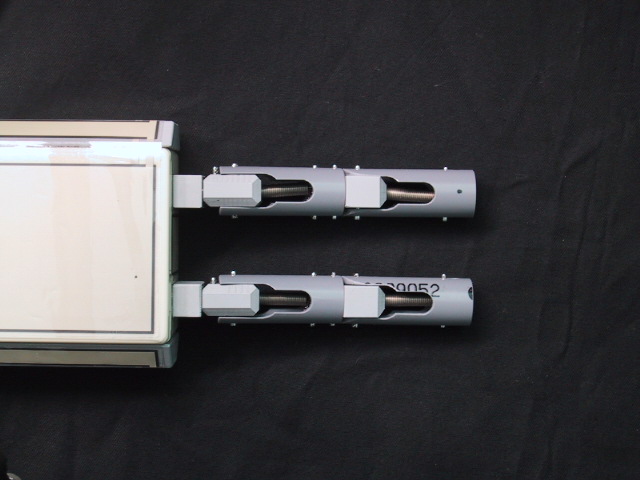
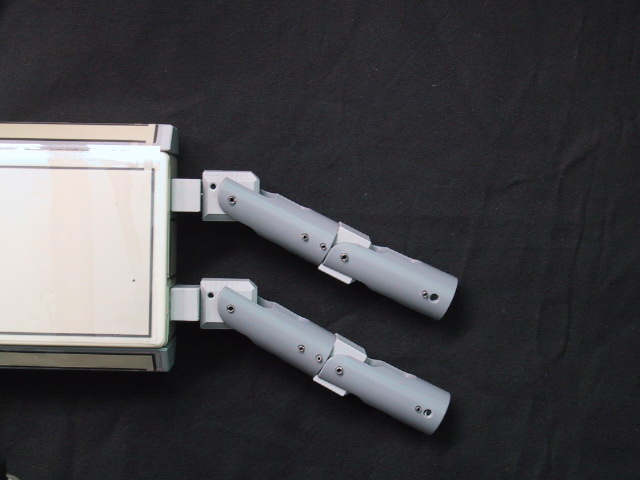
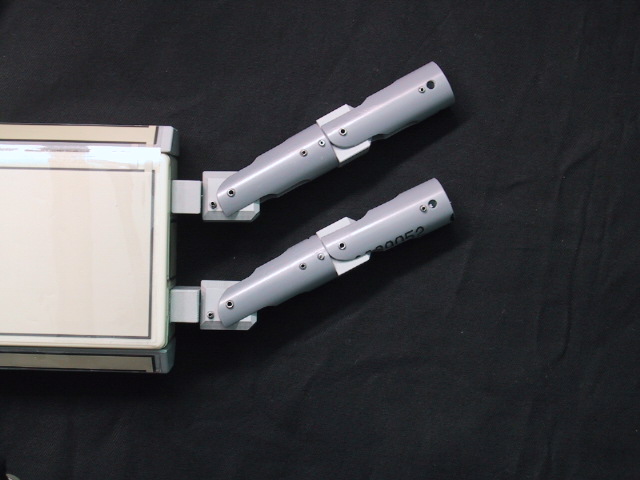
直径18mmのポリ塩化ビニル(塩ビ)製のパイプとブロックを加工したもので,全長100mm,3関節構造です.第1関節は,胴体の面に垂直な軸で,360度自由に回転します.この関節の軸方向の引っ張り力を引っ張りセンサで検出します.第2関節(第1軸と肩で直交する軸)と第3関節(肘)は人間を模して回転範囲が制限されています.また,弱いバネが内蔵されていて,何も拘束がないと画像に示すような姿勢に保たれます.




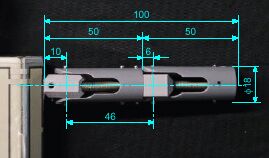 腕の寸法
腕の寸法
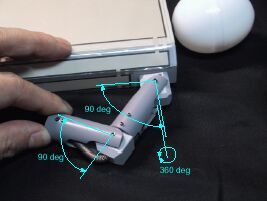 腕の関節の可動範囲
腕の関節の可動範囲
脚
腕とほぼ同じですが,第3関節(膝)の可動範囲が腕と逆になっています.




 脚の寸法
脚の寸法
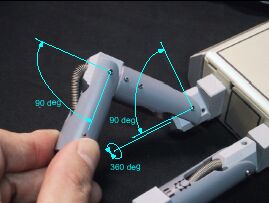 脚の関節の可動範囲
脚の関節の可動範囲
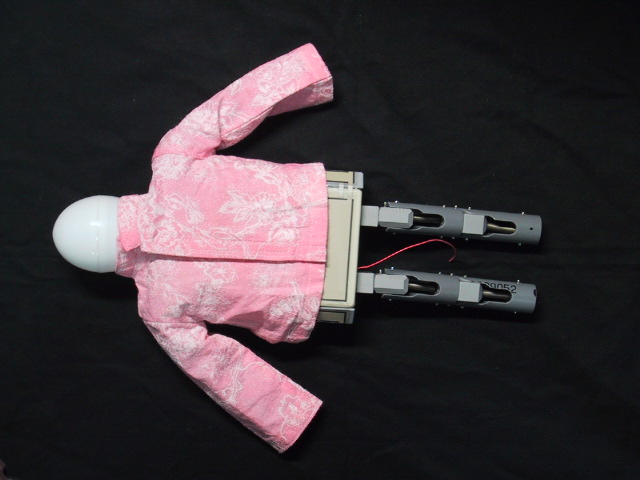
服
ダミーには,体表センサの保護と現実らしさのために服を着せます.本番機用の服の仕様はまだ確定していません.参考までに,プレ大会の服の画像を載せておきます.



★本番機用の服の型紙を載せる?
(C) 2001 Rescue Robot Contest Committee