Last modified: Sun Feb 11 14:53:52 JST 2001
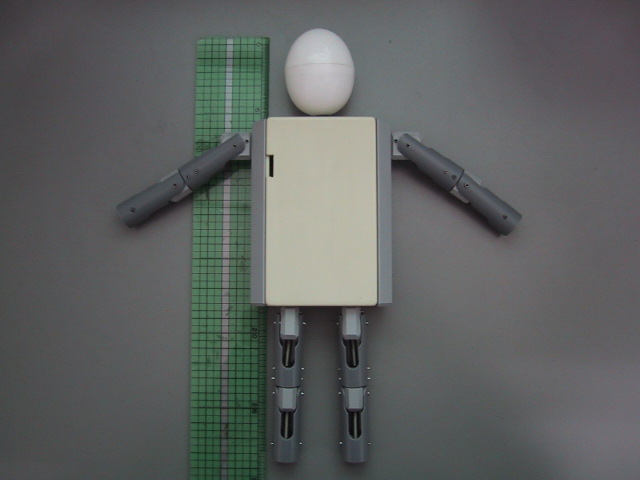
以下に開発中のダミーの概略をお知らせします. ただし,これは開発段階の情報であり, 最終版では形状や仕様が少々変更する可能性がありますので, ご注意ください.
身長280mm
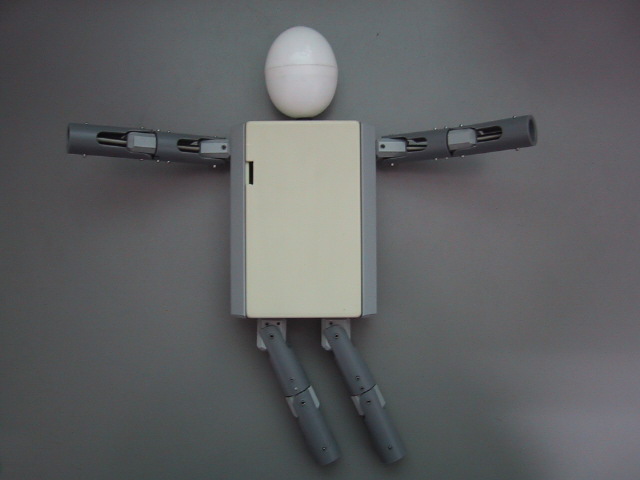 腕と脚の向きを変えたところ
腕と脚の向きを変えたところ
 腕の部分の拡大
腕の部分の拡大
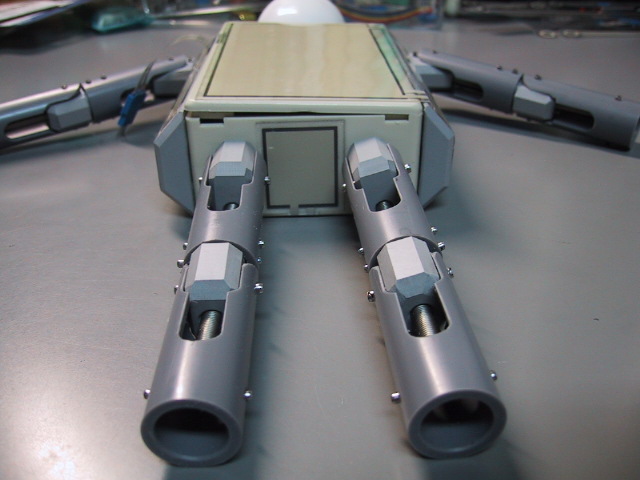
 脚の部分の拡大
脚の部分の拡大
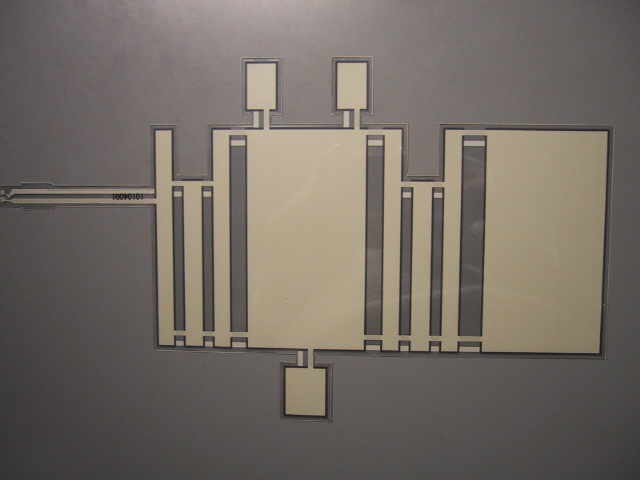 体表センサー用感圧センサーシート
体表センサー用感圧センサーシート
 胴体に体表センサを貼り付けた状態
胴体に体表センサを貼り付けた状態
 股の体表センサ
股の体表センサ
 肩の体表センサ
肩の体表センサ
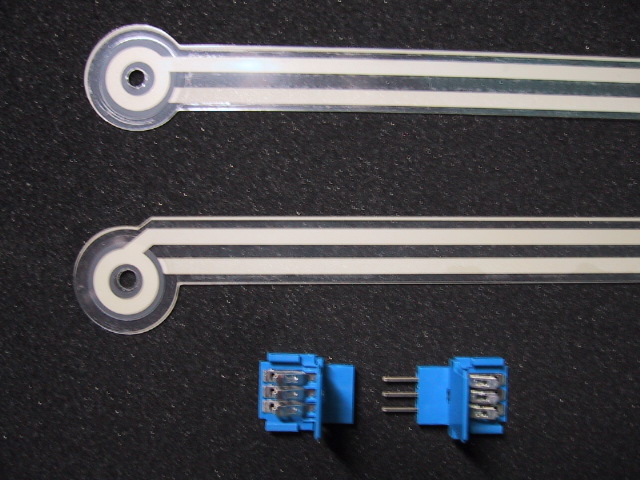 引っ張りセンサ用感圧センサシート
引っ張りセンサ用感圧センサシート
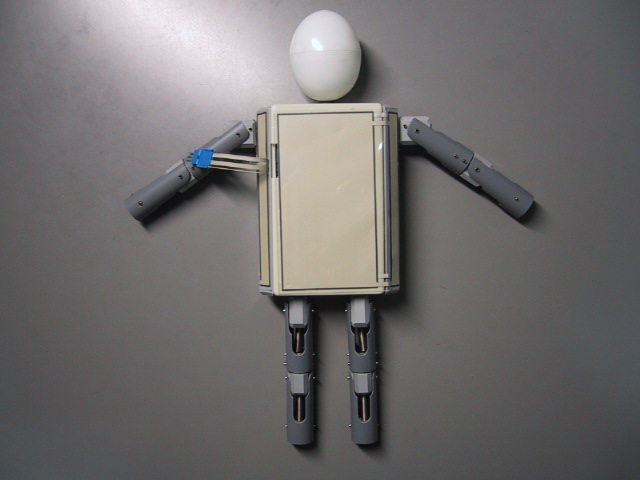
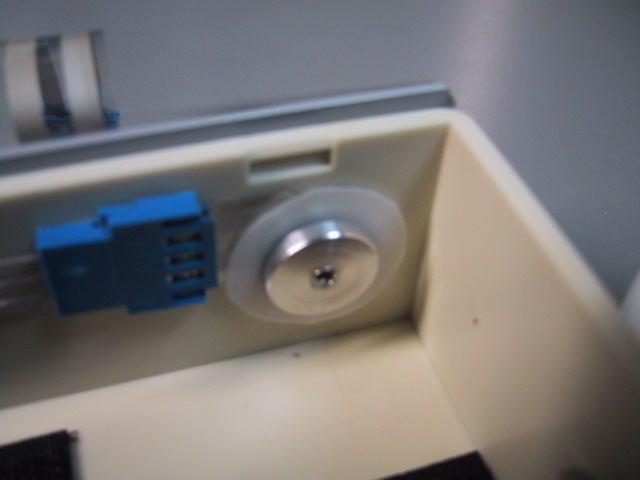
 引っ張りセンサ用のシートをケースに取りつけたところ
引っ張りセンサ用のシートをケースに取りつけたところ
 腕の付け根の引っ張りセンサ用の部品 (最新のものは形状を少し変更)
腕の付け根の引っ張りセンサ用の部品 (最新のものは形状を少し変更)
 付け根の部品を取りつけたところ
付け根の部品を取りつけたところ
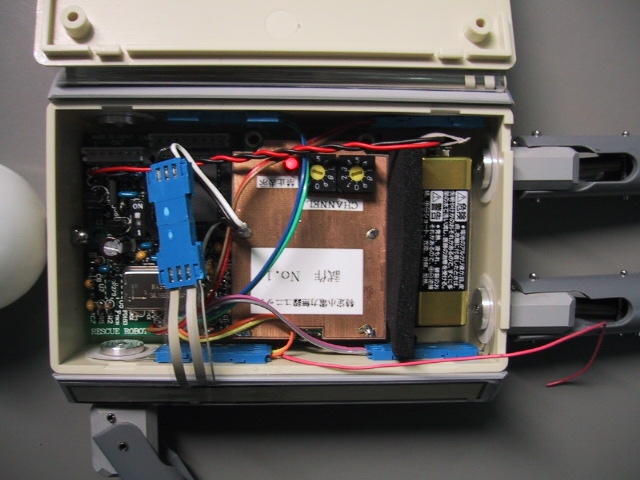
 胴体内部,黒いのは基板固定用のマジックテープ
胴体内部,黒いのは基板固定用のマジックテープ
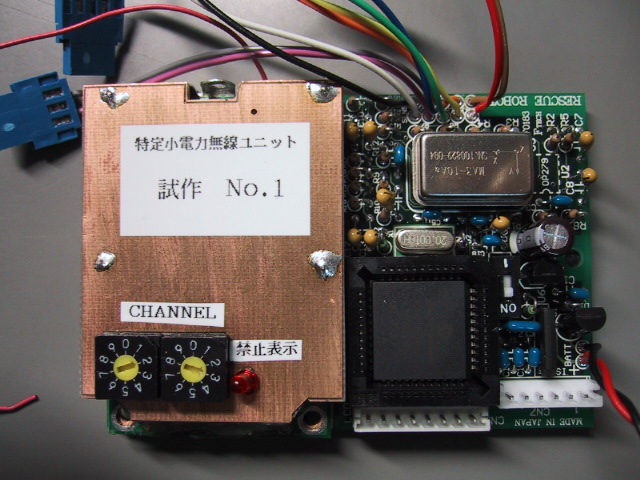 プリント基板,左側の銅色の部分が無線ユニット,銀色の長方形は加速度センサ,
黒色の正方形はPIC16F877
プリント基板,左側の銅色の部分が無線ユニット,銀色の長方形は加速度センサ,
黒色の正方形はPIC16F877
 基板を胴体に組み込んだ状態とデバッグ用の液晶ユニット
基板を胴体に組み込んだ状態とデバッグ用の液晶ユニット
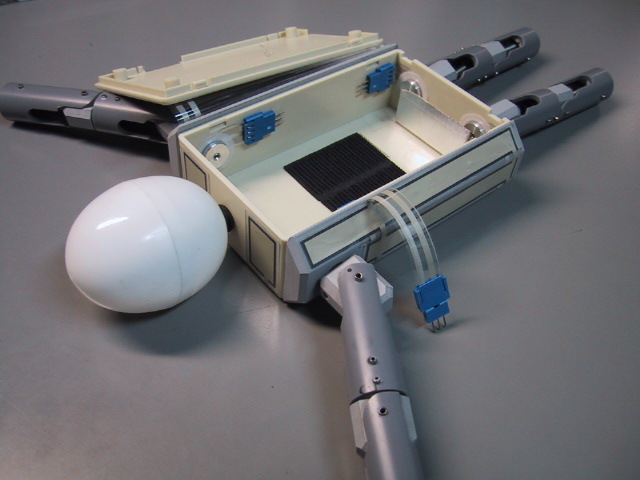
 全てを胴体に収めた状態
全てを胴体に収めた状態
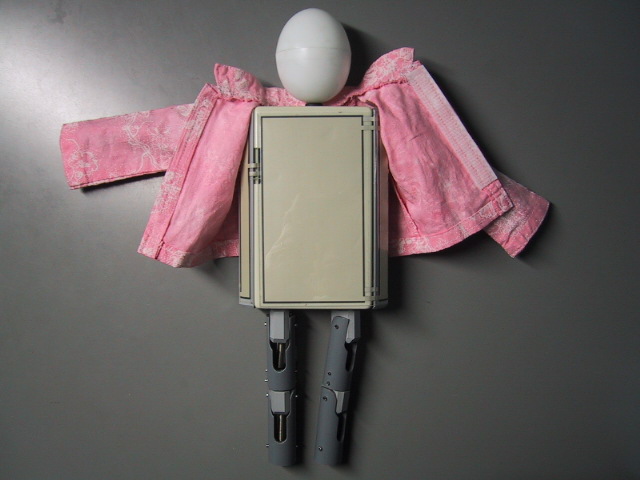 シャツを着て...
シャツを着て...
 ズボンはどうしたの?
ズボンはどうしたの?
 実はプレ大会用の服なので胴回りがキツイ
実はプレ大会用の服なので胴回りがキツイ
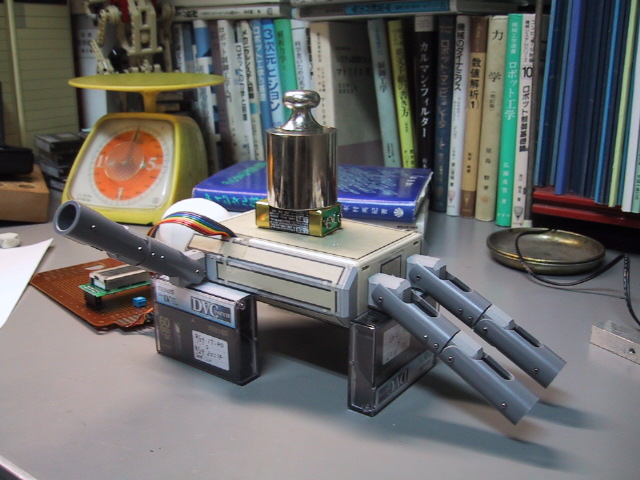
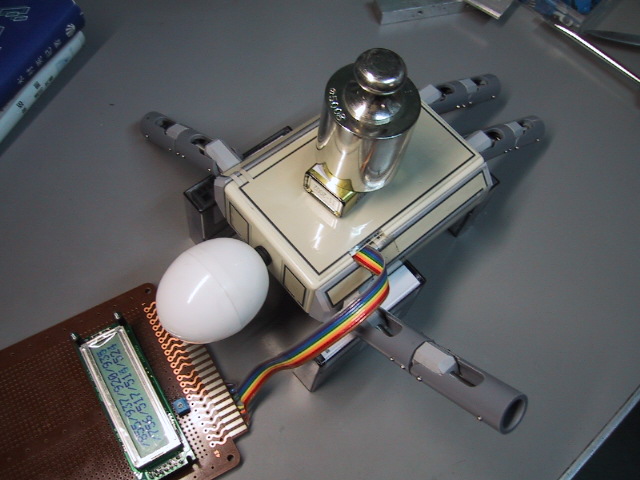
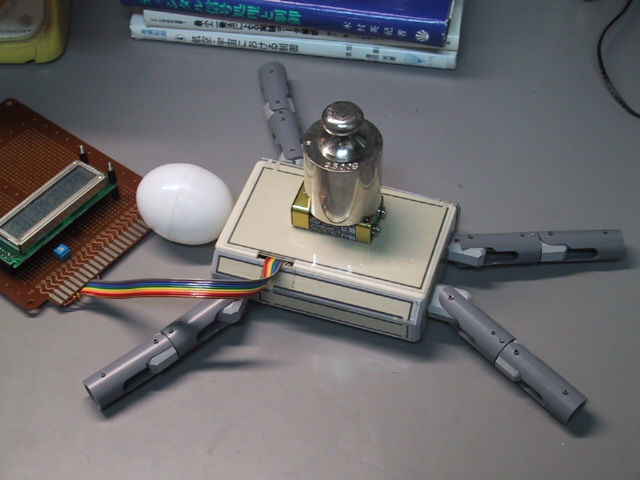
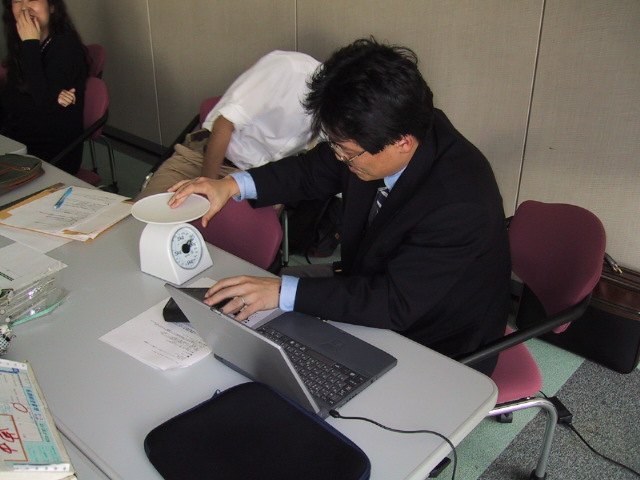
 体重測定
体重測定
 体表センサ試験風景
体表センサ試験風景
 体表センサ試験風景 その2
体表センサ試験風景 その2
 体表センサ試験風景 その3
体表センサ試験風景 その3
 引っ張りセンサ試験
引っ張りセンサ試験
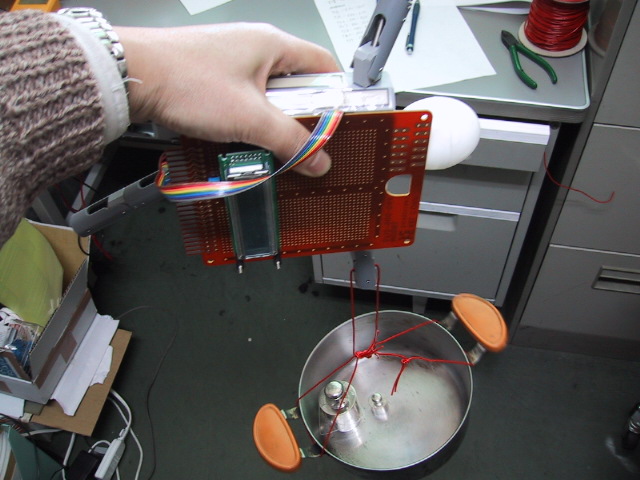 引っ張りセンサ荷重中
引っ張りセンサ荷重中
 落下試験風景
落下試験風景
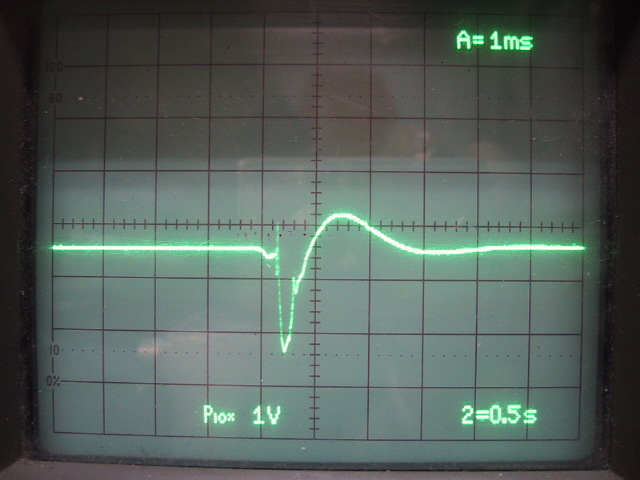 100mmから落下したときの加速度センサの出力の一例
(横1マス0.5秒,縦1マス40m/s^2)
100mmから落下したときの加速度センサの出力の一例
(横1マス0.5秒,縦1マス40m/s^2)
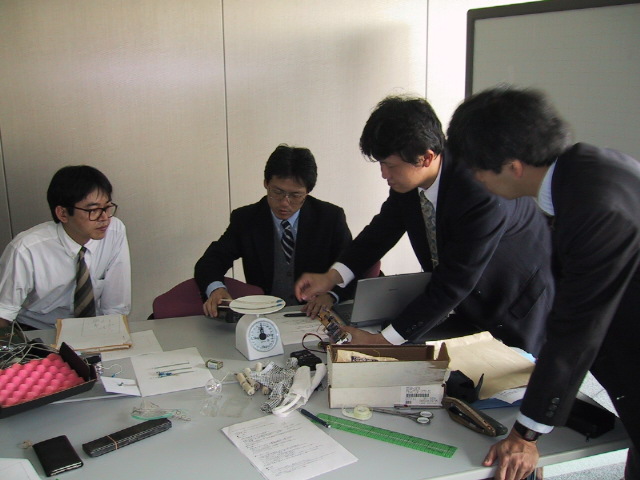 ダミープロジェクトの面々
ダミープロジェクトの面々
 荷重について検討する
荷重について検討する
 荷重について検討する その2
荷重について検討する その2