
Contest background
After the Great Hanshin-Awaji Earthquake, we investigated and researched the technical issues of life-saving equipment. At that time, I realized that it is important not only to continue research on life-saving activities and equipment, but also to raise awareness of them across generations.
Therefore, we proposed the Rescue Robot Contest as a means to pass on the technology and develop the next generation of human resources, with the big goal of expanding the rescue system and creating a world that is resistant to disasters.
Events such as robot contests can be evaluated on the three axes of "education," "sociality," and "science and technology."
First of all, by holding such a contest, you can create creativity just like a conventional robot contest.
We can provide a place and opportunity to nurture (education). Also, by participating in the competition, disaster relief and
You can have them think deeply about disaster prevention and mitigation, and even those who watch the competition can think about disaster prevention and mitigation.
You can raise your awareness (sociality). In addition, specialized researchers and engineers from the participating teams
I also hope that new rescue ideas that could not be used will be born (science and technology).
In this way, Rescon has all the elements of these three axes, and each element is called "gentleness".
It is connected by the core concept.

Of course, there is a big difference between the actual rescue site and the competition venue we are thinking of here, and we do not think that practical rescue technology will be born immediately in this contest. However, I would like to propose many opportunities to think about the importance and difficulty of rescue activities by having many people participate in such contests. By doing so, I hope to find a truly useful "shining idea" out of 1,000 ideas.
Competition scenario
This is the "International Rescue Engineering Laboratory" (a fictitious laboratory). Rescue robot system and remote control Evaluation of rescue technology proposed by the team in a contest format with the aim of advancing vertical technology And training is being carried out. Simulates a person left behind in a damaged building (1/4 experimental field) I have to find a dummy doll (nickname: Damiyan) and rescue it. There Then, the rescue robot that received the dispatch request goes to rescue. However, a large-scale power outage occurred It is a very dangerous situation because the visibility is poor and there is a risk of earthquake recurrence. Obstacles to secure rescue routes In addition to removing harmful substances, investigating the damage situation, preventing the spread of fire and preventing gas explosion, Damiyan Explore and discover and report your whereabouts and condition. And, rescue Damiyan quickly, gently and safely. I will transport it to a suitable place.
Competition rules and progress
Competition rules
The team throws in the robot from the designated start gate and Perform the following three missions within the time limit. Each mission When achieved, each will be given a set mission point.
| Work mission (up to 60 points) | Remove obstacles in the aisle to secure a rescue and carry-out route. |
| Survey report mission (up to 90 points) | Report the damage situation in the building. |
| Rescue mission (up to 150 points) |
After exploring and discovering several Damiyans placed in the competition field and rescuing them from the room, they will be taken out to a safe place (rescue area). In addition, we will determine the condition of Damiyan and provide relief supplies such as drinking water. Damiyan has a built-in sensor that can detect whether or not it has been treated roughly, and not only how quickly it can be rescued, but also how easy it is to handle Damiyan is an important evaluation criterion. |
The operator who controls the robot remotely controls the robot in the control room, mainly relying on the image of the camera mounted on the robot.
In addition, fouls (yellow flag, red flag, black flag) will be declared at the discretion of the referee for the destruction of the field and Damiyan, dangerous acts, etc.
Progress
Two teams will be divided into two sides in the experimental field and start rescue activities (rescue activities) at the same time.
There are slopes and hills in the field, and you have to rescue three Damiyans in time and carry them to a safe place with just a robot. The progress of the competition is as follows.
| Presentation (2 minutes 30 seconds) | We will explain the characteristics of teams and robots, and the thoughts of rescue activities. |
| Strategy meeting (3 minutes) | We will hold a strategy meeting just before rescue activities using a heli-tele camera (overhead camera). |
| Rescue activity (10 or 12 minutes) | The operator relies only on the camera for rescue activities. |
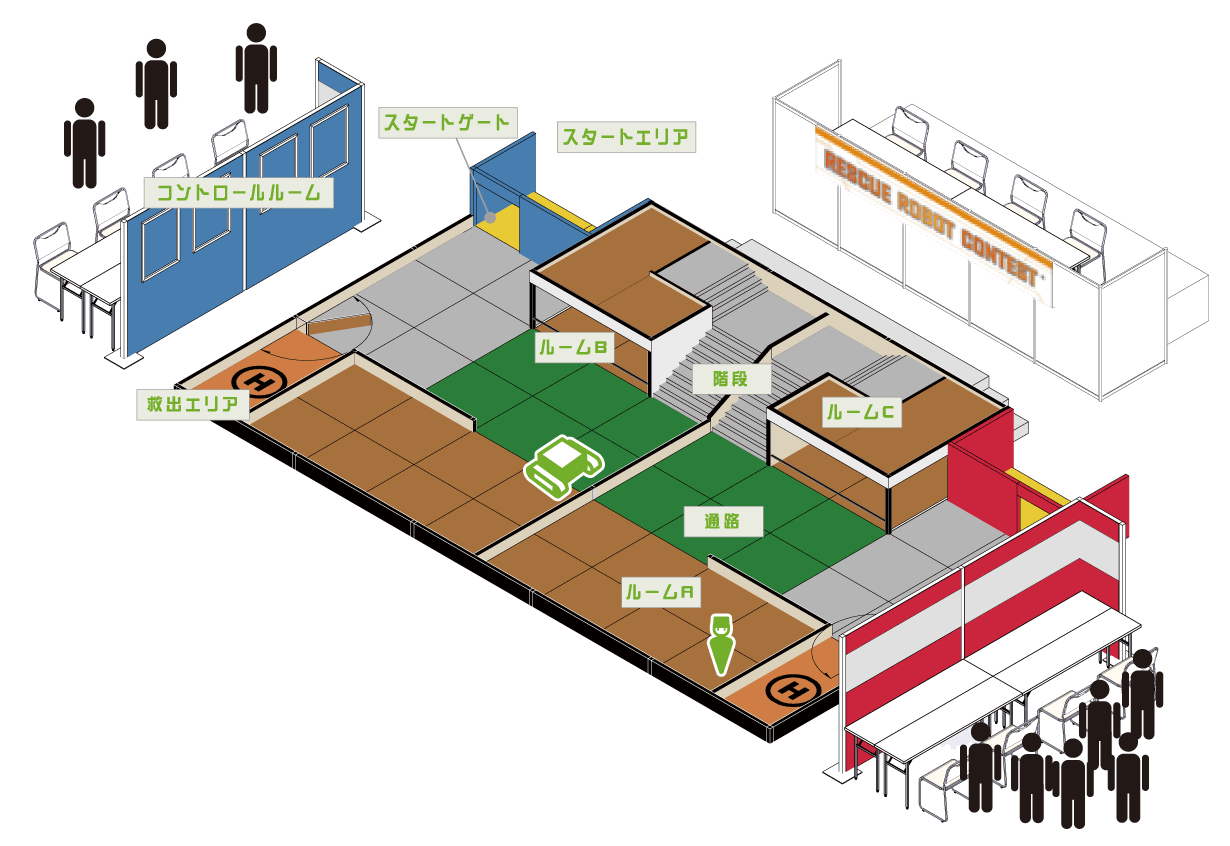
Experimental field (competition field)
The competition field has two two-story buildings on the left and right, each with three rooms. In the competition field, there are narrow spaces with ceilings and walls, stairs, etc., and furniture etc. are scattered in each room. doing. There are obstacles such as collapsed ceiling materials in the passage, which hinders rescue and transportation. Team members remotely control the robot from within a control room separated by walls on both sides of the competition field.
Rescue Robot

The robot is equipped with a camera, and the operator does not look directly at the experimental field, but performs remote control wirelessly by relying only on the image of the camera and various sensor information. There is no limit on the number of units, weight, etc., but the number of operators is limited to two.
Rescue dummy (Damiyan)

A doll with a height of 20 to 30 cm that imitates a rescuer, various built-in sensors detect extra force on the body and rough handling, and those signals are transmitted wirelessly to a computer outside the competition field. Damage such as pain is calculated based on those signals and displayed on the Damyan indicator screen. In addition, it is required to identify the different sounds, lights, and chest marks set for each Damiyan, assuming that the rescuer's condition is determined from a remote location. Damiyan's physical strength gradually decreases over time, further decreasing due to the damage Damiyan received, but recovers when relief supplies are provided. Damiyan's physical strength is evaluated by physical points. These are evaluated per Damyan, with an initial value of 100 points. Also, if the identification result is correct, mission points will be added.
Mission members
Members who compete in the competition field are "mission members". The roles of mission members are as follows.
| Captain | Oversee the team |
| Speaker | Make a team appeal |
| operator | Operate a robot (2 people or less) |
| helper | Transport the robot on the field to the robot base when restarting |
| Communication device administrator | Manage wireless communication systems for remote control robots and related equipment |
| engineer | Assisting robot maneuvering and servicing robots |
Damiyan indicator screen
The indicator displayed during the competition displays real-time information during the competition.
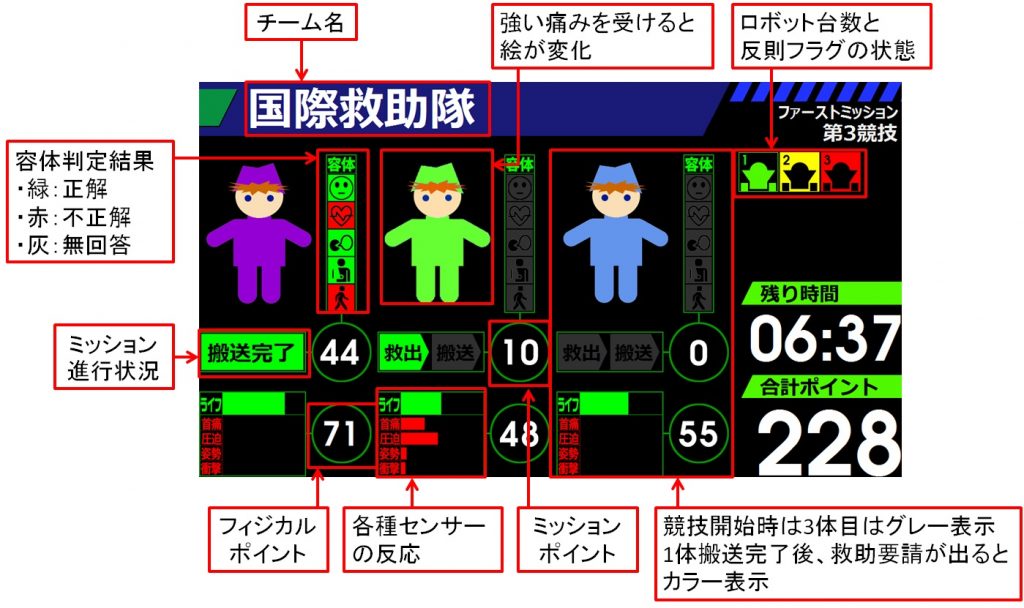
Click to see a larger image
Evaluation / Awards and commendations
Evaluation
| Total points (out of 1800 points) | Competition points (out of 1200 points) + judges points (out of 600 points) |
| Competition points (out of 1200 points) | First mission confirmed points (out of 600 points) + Final mission confirmed points (out of 600 points) |
| Judge points (out of 600 points) | Judge points are evaluations of aspects that cannot be reflected in competition points from the perspective of each judge. |
Awards and commendations
We commend teams, robots, and members who have achieved excellent results with various awards.

About the Rescue Engineering Award
From the perspective of rescue engineering, the Rescue Engineering Award is given to the best team by comprehensively judging "concept," "technical ability," and "organizational ability."
| "concept" | According to the Rescon Philosophy, the team's way of thinking about rescue in the presented Rescon story, and it Evaluate the idea of the robot to be realized. In addition, the concepts and ideas of these teams will be presented in the submitted documents and competitions. Evaluate whether it is expressed in an easy-to-understand manner. |
| "Technical power" | We will evaluate the technical capabilities of robot manufacturing that realizes the team concept and the performance of those robots in actual competition. "Number of restarts", "Number of various flags", etc. at the time of competition are added to the evaluation. |
| "Organizational power" | We will evaluate the organizational strength of the team, such as the team's management ability to systematically and systematically carry out robot production, teamwork in rescue activities during competition, and the degree of cooperation with the other team. |

Click to see a larger image