
ストーリー(競技の舞台設定)
ここは『国際レスキュー工学研究所※』。この研究所では、レスキュー技術の評価と訓練のために、コンテスト形式で実験が行われています。研究所内には、大地震で半倒壊となったビルや施設内部を模擬した1/4スケールの実験フィールドが構築されており、いままさにレスキュー訓練が開始されようとしています。今回の状況設定は次のとおりです。
※今のところは、架空の研究所です。
状況設定(競技シナリオ)
被災した建物内(病院/高齢者施設/オフィスビル/工場など)で取り残された人を探して一刻もはやく助け出さなければなりません。そこで、出動要請を受けたレスキューロボット隊が救出に向かいます。ところが大規模停電が発生し視界が悪く、地震再発の恐れもあるため大変危険な状態です。
レスキューロボット隊は、通電・復電火災やガス爆発による二次災害の発生防止対策を行うとともに、現場を調査し、被災状況などを報告します。一方で、通路上にある障害物を撤去し救出経路を確保するとともに、ダミヤンを探索発見し、居場所や容体を報告します。そして、必要に応じてショアリングやクリビングなどにより什器や瓦礫などの安定化を図り、ダミヤンをはやく、やさしく救出し安全な場所まで搬送します。
2023大会における主な変更点
- 貸与機器の変更
- 競技会予選における課題フィールドの配置等の変更
- 競技会本選における作戦会議の廃止
- 競技会本選における室内カメラ映像の取り扱い方法の変更
- 競技会本選におけるミッションポイントの変更
→競技会本選におけるブレーカ対応タスクの追加
→競技会本選における調査報告ミッションの内容変更 - 競技会本選における障害物の変更
競技ミッション
競技会場には、大地震で半倒壊となったビルや施設、工場などの半倒壊建屋を模擬した1/4スケールの競技フィールド(約9m×5.5m)が用意されています。フィールド内には、行方が分かっていない要救助者を模擬したレスキューダミー(愛称:ダミヤン)が数体配置されています。
建物の間取りはあらかじめ把握することができ、要救助者の捜索対象は3部屋であることがわかっている。チームは、指定されたスタートゲートからロボットを投入し、制限時間内に以下の3つのミッションを行います。
- ・作業ミッション
- レスキュー活動に関連したミッションです。「障害物撤去」、「ブレーカ対応」のタスクが存在します。
- ・調査報告ミッション
- フィールドの状態を確認し、報告するミッションです。「現場到着」、「被災状況報告」のタスクが存在します。
- ・救出ミッション
- フィールドに存在するレスキューダミーを救出するミッションです。「支援物資提供」、「容体判定」、「救出」、「搬送」のタスクが存在します。なお、被災状況報告タスクにおいてレスキューダミーの存在無し報告している状態では救出ミッションは発生しません。
競技では、最初にプレゼンテーション(2分30秒)を行います。その後、レスキュー活動(ファースト・セカンド10分。ファイナル12分)を行います。
各チームのロボットは、スタートエリアから出動し、レスキュー活動時間内に数体のダミヤンを救出し、救出エリアへ搬送しなければなりません。オペレータはコントロールルーム内でロボットに搭載されたカメラの映像だけを頼りにロボットを操縦します。ただし、自律型ロボットを使うこともできます。
競技フィールド等 説明動画
新競技フィールドおよび競技ミッションの説明動画です。
競技フィールド

競技フィールドは、テストフィールド、コントロールルームで構成されています。
テストフィールドは、被災した倒壊建屋内を模擬しており、コントロールルームは被災していない安全な場所と想定しています。
テストフィールドおよびスタートエリアとコントロールルームが離れた場所であることを模擬するために、隔壁で区分けし、直接情報収集ができない状況を作り出しており、キャプテン、オペレータ、エンジニア、通信デバイス管理者はコントロールルーム内で活動を行います。
テストフィールドは、フィールドと外部フィールドに区分されます。
フィールド
フィールドは以下の3エリアで構成されます。
- ・ルーム
- →フィールド内の探索を必要とする場所。ルーム内には、「被災状況報告」ミッション用の報告対象が配置されています。ルーム内部は、閉鎖空間となっている場合があります。内部に照明がない場合があります。ルーム内の1区画を「ブロック」とよび、ブロック内には、レスキューダミーや障害物等が存在します。
- ・共通エリア
- →ルームをつなぐ通路・階段のこと。階段がスロープに変更される場合があります。障害物等存在します。
- ・救出エリア
- →救出したレスキューダミーを搬送する先の屋外という設定です。救出エリアにレスキューダミーを搬送した場合のみ「搬送完了」となります。救出エリアの出入り口には、ドアが設けられています。
外部フィールド
外部フィールドは、被災した倒壊建屋への侵入口付近を再現しています。外部フィールドは、以下の2エリアで構成されます。
- ・スタートエリア
- →ロボットおよびその付属品が配置される1,800mm×900mmの区画。 フィールドへ出るためのスタートゲートがあり、道路上面からの高さが600mmであり、幅は700mmです。すべてのロボットはスタートゲートの下を通り出動しなければなりません。

- ・ヘルパーエリア
- →競技中にテストフィールド側でヘルパーが待機する場所。コントロールルームからは隔離された位置に設定します。
その他
フィールド内には、通常のガレキ以外に、写真に示すような屋内を模した物(ガレキ扱い)も設置される可能性があります。
写真はあくまでイメージです。

チームメンバー
競技会において、フィールド裏手、チーム控え室および競技会場等出入りを制限される場所に入ることができます。競技開始前および終了後、ロボット等を運搬するために競技会場に入場 することができます。
競技メンバー
競技会において、コントロールルームに入り競技を行うことができるメンバー。
競技メンバーは、チームメンバーの中から登録し、7名を上限とする。
ミッションメンバーはそれぞれ以下に示す担当を務める。
(一部は兼務可能)
- ・キャプテン
- →チームの指揮を執り、チームを総括する。リスタートの要請を行う。
- ・スピーカー
- →ロボットおよび戦術のプレゼンテーションを行う。
- ・オペレータ
- →ロボットの操縦、操縦の補佐、コントロールルーム内のロボットの整備を行う。競技中は、オペレータのみロボットを操縦することが出来る。2 名を上限とする。
- ・エンジニア
- →ロボット操縦の補佐、コントロールルーム内のロボットの整備を行う。競技中にロボットのコントローラに触れることは認められない。
- ・通信デバイス管理者
- →ロボット通信システムおよびそれに関連する機器の管理を行う。
- ・ヘルパー
- →競技中に主にテストフィールド で ロボットの運搬、整備等を行う。また、 リスタート時など 審判の指示を受けた際に、フィールドに侵入しロボットを回収する。
ロボット
ロボットは遠隔操作型あるいは自律型とする。
ロボットにはカメラが搭載されており、メンバーは競技フィールドを直接見ずに(競技会予選は目視可能)、カメラの映像や様々なセンサ情報だけを頼りに無線および有線で遠隔操縦を行います。ロボットの台数、サイズ・重量・機数に制限はないが、スタートエリア(900mm×1800mm)内にすべてのロボット(使用する交換部品等を含む)を配置でき、実験フィールドへはベスタートゲート(幅700mm×高さ600mm)を通過しなければならない。なお、ロボットを操作できるオペレータは2名までに制限されています。
ロボット上部のわかりやすい位置に、操作が容易にできるように、すべてのエネルギー源を遮断できる緊急停止スイッチを取り付けなければならない。
レスキューダミー(愛称:ダミヤン)

要救助者を模擬した身長20~30cmの人形(※複数用意されているが、寸法、形状や質量にはばらつきがある)で、内蔵された各種センサにより、ボディへの余分な力や手荒な扱いを検知し、それらの信号は競技フィールド外のコンピュータヘ無線で送信されます。それらの信号に基づいて痛みなどのダメージを計算してダミヤンインジケーター画面に表示します.また,離れた場所から要救助者の容体を判定することを想定して、各ダミヤンには「顔の色(頭部の一部の発色」「音声(周波数)」「鳴動パターン」「二次元コード(QRコード)」の4つの識別因子が設定されており、それらの情報から「歩行」「負傷」「呼吸」「脈動」「意識」の5つについて容体判定を行います。
点数評価
ポイントの内訳は以下のとおりである。
- 競技ポイント(1200点満点)
- = ファーストステージ確定ポイント(600点満点)+ ファイナルステージ確定ポイント(600点満点)
- 総合ポイント(1800点満点)
- = 競技ポイント+ 審査員ポイント(600点満点)
各ステージごとの確定ポイント(600点満点)は、救出中の各ダミヤンに対するダメージ(フィジカルポイント)と各ミッション作業の達成度を評価する(ミッションポイント)を総合した点数で評価されます。ダメージはダミヤンに内蔵されたセンサで判断します。また、ミッションポイントは「作業ミッション」「調査報告ミッション」「救出ミッション」の3つのミッションの達成度でポイントが発生します。各ポイントの詳細を以下に記します。
また、反則には該当しないが、悪質な行為が認められた場合、審判団は50点を限度として合計ポイントを減点することができる。詳細は規定を参照してください。
フィジカルポイント (100点満点/ダミー)
ダミヤンの体力を表しています。時間の経過と共に値が徐々に減っていき、ダミヤンに内蔵されたセンサが力や衝撃を検出する度に値がさらに減ります。これらは、ダミヤンごとに評価され、最初の値は100点です。
「支援物資提供タスク」によるヒーリングインデックスによりフィジカルポイントの回復が行われた場合であっても、フィジカルポイントの最大値が100点を超えることはありません。
ミッションポイント(300点満点)
ミッションポイントの内訳は以下のようになっています。
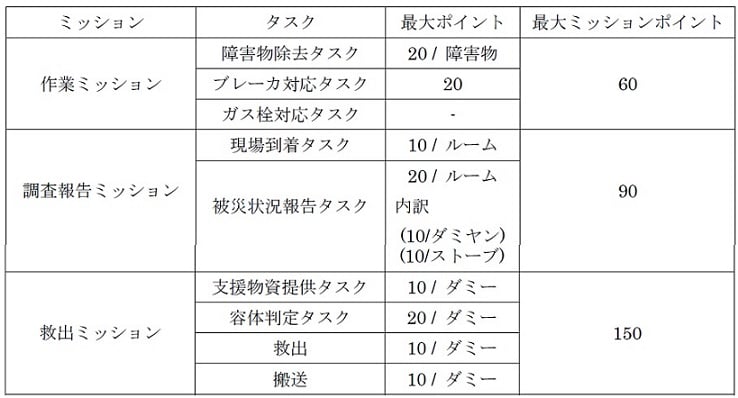
- 「作業ミッション」(60点満点)
-
・障害物除去タスク(20点/障害物)
→現場へ到着するため、またダミヤンの安全な搬送ルートを確保するために通路の障害物を指定された場所に撤去することで与えられる。

-
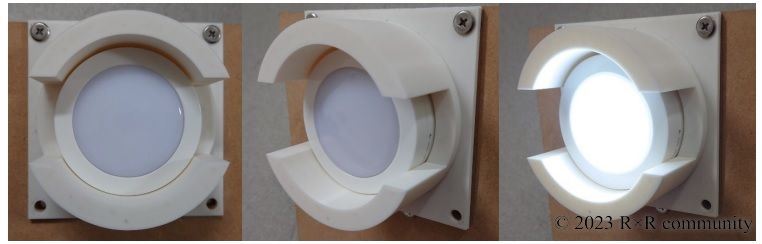
・ブレーカ対応タスク(20点)
→LED プッシュライトは競技開始時に点灯しており、スイッチを押すことで遮断が行われ、成功するとランプが消灯することで与えられる。以下の写真はあくまでイメージ図である。
- 「調査報告ミッション」(90点満点)
-
・現場到着タスク(10点/ルーム)
→調査対象の現場(ルーム内)に、ロボットが到着することで与えられる。 -
・被災状況報告タスク(20点/ルーム)
→現場(ルーム内)のダミヤンの存在有無(10点)や二次災害の発生原因となりえる「ストーブ」の存在有無(10点)を報告する。正しく識別することで与えられる。本タスクでレスキューダミーを発見したと報告した場合、救出ミッションが発生する。

- 「救出ミッション」(150点満点)
-
・支援物資提供タスク(10点/ダミー)
→救出を指示されたダミヤンに対して、指定された範囲(ブロック)に支援物資を正立状態で提供することで与えられる。

-
・容体判定タスク(20点/ダミー)
→容体判定の正解数に応じて与えられる。判定は「QRコード」「目の色」「鳴動パターン」「音」の4つの因子を識別したうえで、下の表の5つの項目に関してダミヤンの容体判定を行う。なお、容体判定ポイントの内訳は、各項目を正しく識別することで項目毎に4点が与えらる。

-
・救出(10点/ダミー)
→ダミヤンをルーム内より救出することで与えられる -
・搬送(10点/ダミー)
→ダミヤンを救出(屋外)エリアまで搬送することで与えられる。
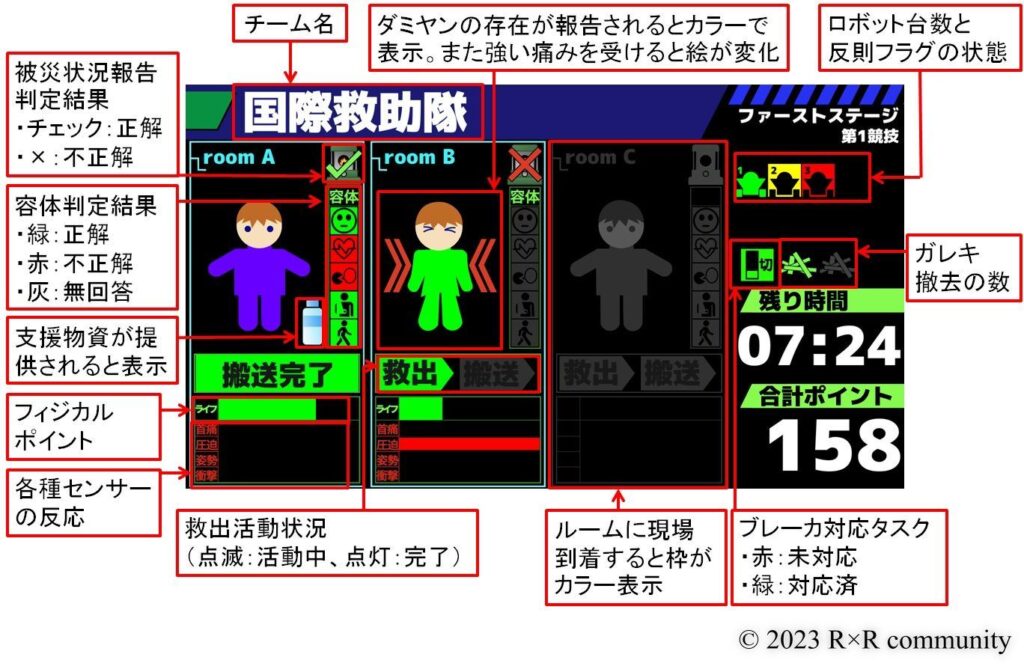
画面の見方
反則について
レスキューに反する行為、フィールドやダミヤンの破壊、危険行為などに対しては、審判の判断で反則が採られます。
反則の概要
- A. 反則の種類
- 反則は「イエローフラグ(警告)」「レッドフラグ(退場)」「ブラックフラグ(失格)」の3 種類がある。
- B. 反則の宣告
- 反則の宣告は、該当するロボット・チームメンバー・チームに対してその色のフラグを提示し、主審が宣告することにより行う。また、宣告時にその具体的内容を簡潔に説明する。
- C. 反則の判断と決定
- 反則であるかどうかの判断は副審もしくは主審が行い、主審がこれを決定する。主審の決定に従い、主審もしくは副審が反則を提示する。
- D.反則内容の確認
- 競技後に、キャプテンは自チームが宣告を受けた反則に対して、主審にその具体的内容の説明を求めることができる。
フラグの種類
- イエローフラグ(警告)
- A. 審判が望ましくないと判断した行為に与えられる。
B. ロボット 1 機ごとに与えられる。
C. 同一のロボットに対し、1 回のレスキュー活動において同じ指摘事項のイエローフラグを規定回数以上与えられた場合レッドフラグとなる。 - レッドフラグ(退場)
- A. 極めて危険な行為、コンテストのフィロソフィーおよび開催趣旨に反する明確な、あるいは、意図的な行為に与えられる。
B. ロボット 1 機ごとに与えられる。
C. レッドフラグが与えられたロボットは退場扱いとなりその競技に復帰することはできない。 - ブラックフラグ(失格)
- ブラックフラグが宣告されると、その時点でチームは失格となり競技を中止しなければならない。
競技中にチームメンバーやチーム全体がコンテストのフィロソフィーおよび開催趣旨に関する重大な違反をしている場合に与えられる。
A. チームに対して与えられる。
B. 自チームの競技時以外の違反行為でも、与えられる。
表彰
優秀な成績を収めたチーム、ロボット、メンバーを様々な賞で表彰しますが、本コンテストで最も意義深い のは「レスキュー工学大賞」です。この賞は、本選の総合ポイントだけではなく、書類やヒアリングも含む総合的な評価で決まります。
- 主催団体からの授与
- ・レスキュー工学大賞
→レスキューロボットコンテストで最も意義深い賞。詳しくは「こちら」をご覧ください。 - ・ベストパフォーマンス賞
→競技ポイントと審査員ポイントの合計である総合ポイントがもっとも高いチームに与えられます。 - ・ベストプレゼンテーション賞
→レスキューロボットコンテストの観点からチーム戦略などについて最も優れたプレゼンテーションを行った個人に与えられます。 - ・ベストチームワーク賞
→レスキュー隊の観点から、現場で必要となる連携作業に対して、チームやロボットの代替具合を評価します。 - ・ベストロボット賞(日本ロボット学会特別賞)
ロボット工学的な観点から,移動および救出機構、遠隔操縦システムなどに優れたロボットに与えられます。 - ・ベストテレオペレーション賞(サンリツオートメイション賞)
→遠隔操縦技術や遠隔操作システムの優れたチームに与えられます。 - 関連団体からの授与
- ・消防庁長官賞
→救助活動において、要救助者の負担を軽減するための先進的な科学技術を導入するという観点から選定されます。 - ・日本消防検定協会理事長賞
→人々の安全、安心を支える防火安全技術の観点からすぐれたロボット技術により迅速なレスキュー活動を遂行したチームに送られます。 - ・計測自動制御学会特別賞
→レスキュー工学大賞の受賞チームに送られます。 - ・日本機械学会ロボティクス・メカトロニクス部門一般表彰
→ベストパフォーマンス賞の受賞チームに送られます。 - ・第十九回竸基弘賞レスキューロボットコンテスト奨励賞((特非)国際レスキューシステム研究機構)
競技説明 動画
「inrevium杯レスキューロボットコンテスト20×21」競技会本選で使用した競技説明ビデオです。