 引っ張りセンサの構造
引っ張りセンサの構造
ニッタが製作した円環状の感圧センサーシート(体表センサと同じもの)を,腕と脚の付け根の胴体の内側に取り付けています.腕や脚が引っ張られると,付け根の軸に取りつけられた円板と胴体の内側の間でセンサシートが押さえ付けられて感応します.このシートは,全体が1つの電気抵抗で,その値はほぼ力に反比例します.そこで,オペアンプを使った回路を通して力に比例する電圧に変換しています.1kgfで出力電圧が100%になるように,回路定数を設計しています.
引っ張りセンサの構造
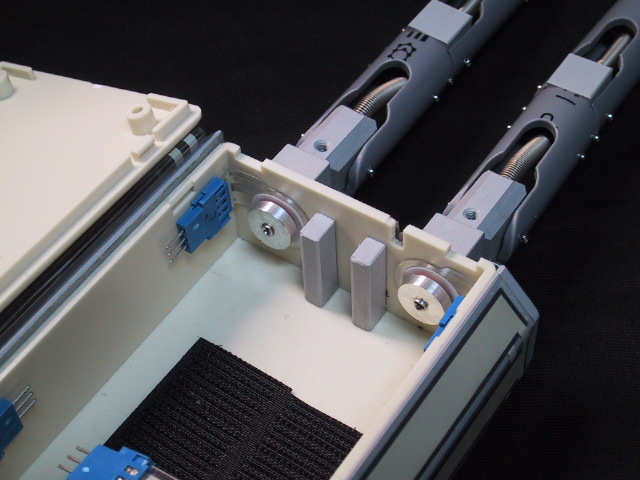 脚の引っ張りセンサ
脚の引っ張りセンサ
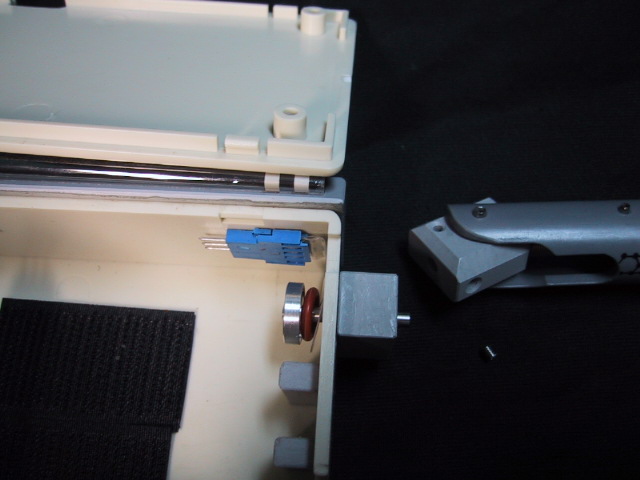
 脚を外したところ
脚を外したところ
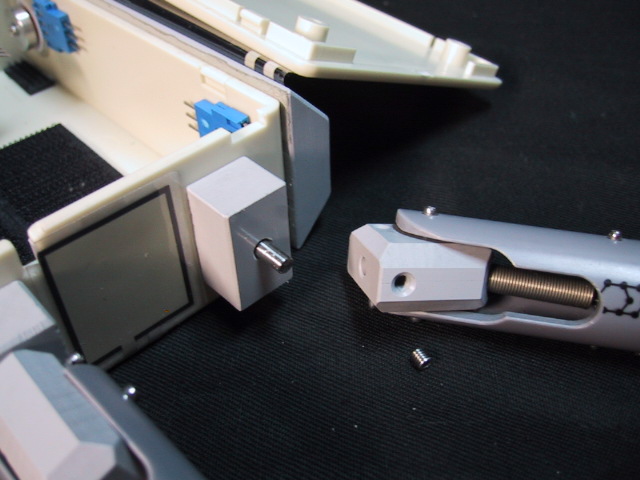
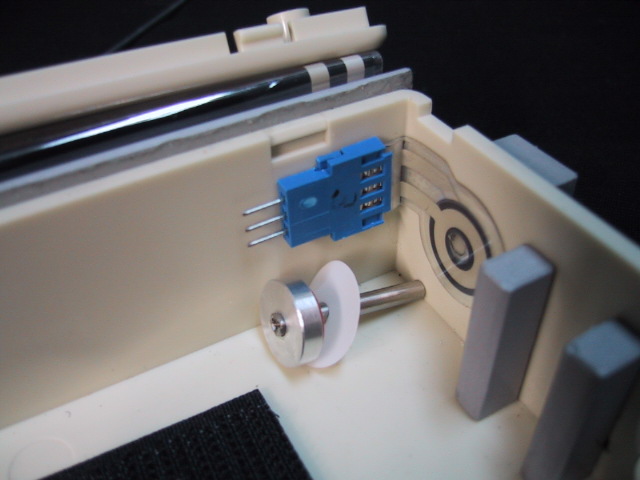 胴体の内側
胴体の内側

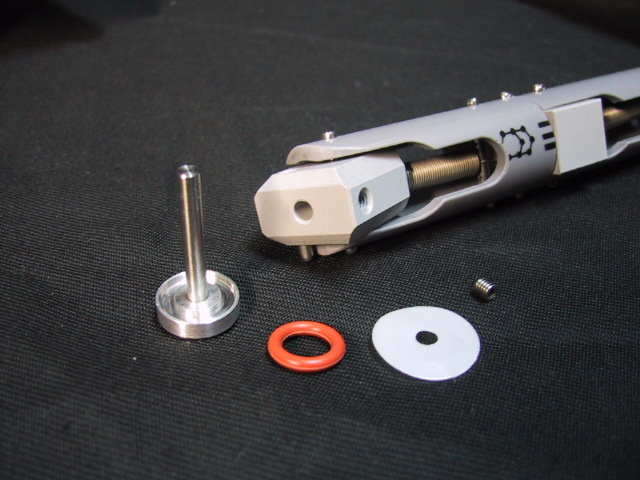 円板,Oリング,テフロンシート,イモネジ,脚
円板,Oリング,テフロンシート,イモネジ,脚